System Flashing
The NE503 device software consists of two layers:
| Layer | Name | Contents | Update Method |
|---|---|---|---|
| System Image | hailo-os | Linux kernel, device tree, root filesystem | Flashing/upgrade (this document) |
| Platform Software | hailo-ne503 | Platform services, HAL, Web console | Software Deployment |
This document covers the initial flashing and subsequent upgrades of the system image. For building and deploying platform software, see Software Deployment.
Workflow Overview
Choose a path based on the current state of the device:
- Initial deployment / full flash (new board, or bootloader corrupted): §1 Prerequisites → §2 Flash Boot Chain → §3 Flash System Image → §4 Interface Board MCU Firmware → §5 System Login → §7 Verification
- Upgrade system image only (device already boots normally): §1.3 TFTP → §6.1 Upgrade → §7 Verification
When to skip §2: if the device can reach the U-Boot menu or already boots into Linux, the boot chain is intact — go straight to §3 or §6. You only need §2 for a brand-new board or a corrupted bootloader (no U-Boot output on power-up). Interface board MCU firmware (§4) is separate from the SoC system image — the
meta-hailo-ospackage does not include MCU firmware; it must be flashed separately via ST-LINK/SWD during initial deployment (see §4), otherwise peripherals (lens, light, IR, PTZ) will not work.
1. Prerequisites
1.1 Firmware Package
Download the firmware package from the open-source repository camthink-ai/meta-hailo-os. After extraction, it contains the following files, grouped by purpose:
Boot-chain components (used by §2, 9 files)
| File | Purpose |
|---|---|
hailo15_uart_recovery_fw.bin | UART recovery firmware |
hailo15_scu_bl.bin | SCU bootloader |
scu_bl_cfg_a.bin | SCU boot configuration |
hailo15_scu_fw.bin | SCU firmware |
u-boot.dtb.signed | U-Boot device tree (signed) |
u-boot-spl.bin | U-Boot SPL |
u-boot-initial-env | U-Boot initial environment variables |
customer_certificate.bin | Customer certificate |
u-boot-tfa.itb | U-Boot TF-A image |
System image (used by §3 / §6, 3 files)
| File | Purpose |
|---|---|
fitImage | Linux kernel image |
swupdate-image-hailo15-ne503.ext4.gz | System root filesystem |
hailo-update-image-hailo15-ne503.swu | SWUpdate upgrade package |
Interface board MCU firmware (used by §4, 1 file)
Separate from the
meta-hailo-ospackage; provided by CamThink.
| File | Purpose |
|---|---|
ne503_mcu.elf | Interface board MCU (STM32G0B0RET6) firmware |
1.2 Host Tools
Only needed for §2 Flash Boot Chain; skip this section if you only do §3/§5 system-image flashing or upgrades.
Boot-chain flashing in §2 supports both Ubuntu and macOS (validated hailo15_board_tools version 1.9.0). hailo15_board_tools is a cross-platform Python wheel; the only differences between the two platforms are how dependencies are installed and the serial device node.
Critical dependency
mkenvimage: thehailo15_spi_flash_programtool in §2.3 shells out tomkenvimageto build the U-Boot env image. If not installed, the flash crashes while writing the 5th component (U-Boot env), leaving a half-written boot chain. Both platforms must install it first — Ubuntu provides it viaapt-get install u-boot-tools, macOS viabrew install u-boot-tools.
Ubuntu
# Hailo flashing tool (replace <VERSION> with the actual version; validated version is 1.9.0)
pip install hailo15_board_tools-<VERSION>.whl
# U-Boot utilities (provides mkenvimage, required by §2.3)
sudo apt-get update && sudo apt-get install u-boot-tools
macOS
# 1. mkenvimage (required by §2.3, otherwise the flash crashes mid-way)
brew install u-boot-tools
# 2. Install the wheel inside a venv (Homebrew Python is PEP 668 externally-managed; a bare pip install is rejected)
python3 -m venv hailo-venv
./hailo-venv/bin/pip install hailo15_board_tools-<VERSION>.whl
# Then use ./hailo-venv/bin/uart_boot_fw_loader and ./hailo-venv/bin/hailo15_spi_flash_program
Serial device node: Ubuntu is typically
/dev/ttyACM0; macOS is typically/dev/cu.usbserial-*or/dev/tty.usbserial-*. Pass your actual node to--serial-device-name(see §1.4 Hardware Connection for how to find it).
Interface Board MCU Flashing (required by §4)
Also requires an ST-LINK debugger (V2/V3) and STM32CubeProgrammer (validated version 2.19.0; uses the STM32_Programmer_CLI tool). Download and install from st.com; on macOS the CLI is typically at /Applications/STMicroelectronics/STM32Cube/STM32CubeProgrammer/STM32CubeProgrammer.app/Contents/MacOs/bin/STM32_Programmer_CLI.
1.3 TFTP Server
Required for §3 Flash System Image / §6 System Upgrade; skip this section if you only do §2 boot-chain flashing.
System images are large (100MB+) and must be transferred to the device via TFTP.
Ubuntu
# Install TFTP server
sudo apt install tftpd-hpa
# Edit configuration
sudo nano /etc/default/tftpd-hpa
Configuration:
TFTP_USERNAME="tftp"
TFTP_DIRECTORY="/var/lib/tftpboot"
TFTP_ADDRESS="0.0.0.0:69"
TFTP_OPTIONS="--secure"
Start the service and deploy firmware files:
sudo mkdir -p /var/lib/tftpboot
sudo chmod -R 777 /var/lib/tftpboot
sudo systemctl restart tftpd-hpa
# Copy firmware files to TFTP directory
cp fitImage swupdate-image-hailo15-ne503.ext4.gz hailo-update-image-hailo15-ne503.swu /var/lib/tftpboot/
macOS
macOS includes tftpd, which runs on-demand via launchd:
# Create firmware directory
mkdir -p ~/Downloads/Firmware
chmod 777 ~/Downloads/Firmware
# Write launchd configuration
sudo tee /Library/LaunchDaemons/com.tftp.local.plist > /dev/null << 'EOF'
<?xml version="1.0" encoding="UTF-8"?>
<!DOCTYPE plist PUBLIC "-//Apple//DTD PLIST 1.0//EN" "http://www.apple.com/DTDs/PropertyList-1.0.dtd">
<plist version="1.0">
<dict>
<key>Label</key>
<string>com.tftp.local</string>
<key>ProgramArguments</key>
<array>
<string>/usr/libexec/tftpd</string>
<string>-i</string>
<string>/Users/<USER>/Downloads/Firmware</string>
</array>
<key>inetdCompatibility</key>
<dict>
<key>Wait</key>
<true/>
</dict>
<key>InitGroups</key>
<true/>
<key>Sockets</key>
<dict>
<key>Listeners</key>
<dict>
<key>SockServiceName</key>
<string>tftp</string>
<key>SockType</key>
<string>dgram</string>
</dict>
</dict>
</dict>
</plist>
EOF
# Start the service
sudo launchctl load -w /Library/LaunchDaemons/com.tftp.local.plist
# Verify
sudo lsof -i :69
Replace
<USER>with your macOS username. Place firmware files in~/Downloads/Firmware/.If TFTP reports "Operation not permitted", add
/usr/libexec/tftpdto System Settings → Privacy & Security → Full Disk Access, or use/private/tftpbootas the TFTP directory instead.
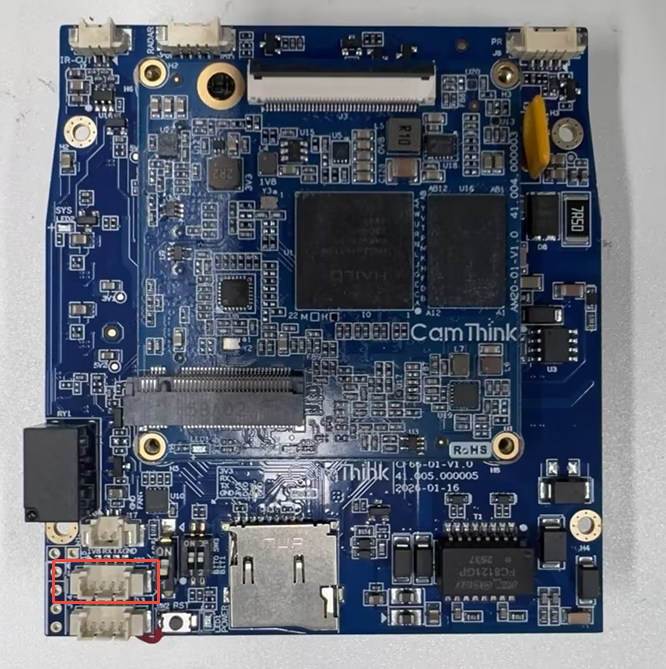
1.4 Hardware Connection
- Connect the NE503 debug UART to the host using a USB-to-serial adapter
The NE503 debug UART uses 1.8V logic levels. A 1.8V-compatible USB-to-serial adapter is required (common 3.3V adapters may not work reliably). Contact CamThink for the recommended serial adapter board.
- Connect the NE503 Ethernet port to the host (direct cable or same switch)
CamThink serial adapter:
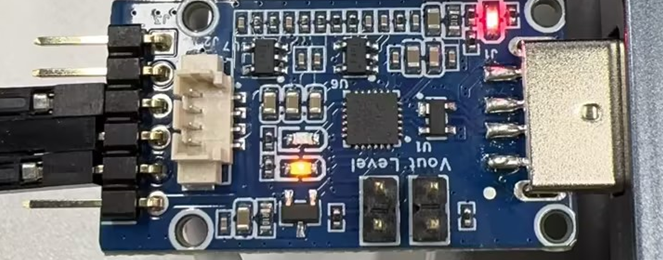
Connected to NE503 board:
- Identify the serial device:
ls /dev/serial/by-id/* -lh
# Example output: usb-1a86_USB_Serial_5B1E071587-if00 -> ../../ttyACM0

The examples below use
/dev/ttyACM0. Replace with your actual device node. On macOS, the device is typically/dev/tty.usbmodem*or/dev/tty.usbserial*.
Open a serial terminal (baud rate 115200). All subsequent flashing logs, U-Boot menu interaction, and system login happen in this terminal:
# Ubuntu (minicom also works)
screen /dev/ttyACM0 115200
# macOS
screen /dev/tty.usbmodem* 115200
On Windows, use SecureCRT or PuTTY at the same 115200 baud rate. To exit screen: press
Ctrl+A, thenK, thenY.
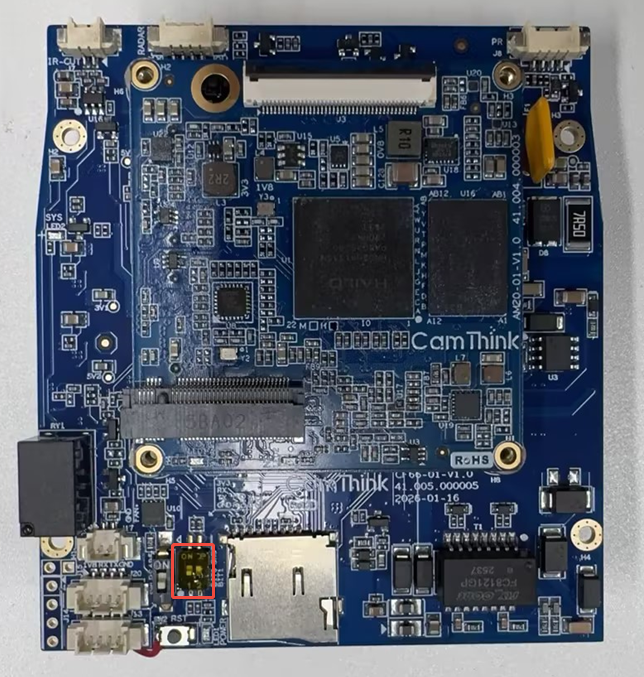
DIP Switch Modes
The NE503 uses two DIP switches (BOOT0, BOOT1) to select the power-on behavior. Later sections refer to these modes by name only — check this table:
| Mode | BOOT0 | BOOT1 | When to use |
|---|---|---|---|
| UART recovery (flash boot chain) | OFF | ON | §2 Flash Boot Chain only |
| Normal boot | OFF | OFF | §3 Flash System Image onward; daily operation |
2. Flash Boot Chain
Boot chain flashing is only needed for initial deployment or if the bootloader is corrupted. Skip this step during normal operation.
2.1 Enter UART Recovery Mode
Set the DIP switches to UART recovery mode (BOOT0 OFF, BOOT1 ON; see §1.4 DIP Switch Modes):
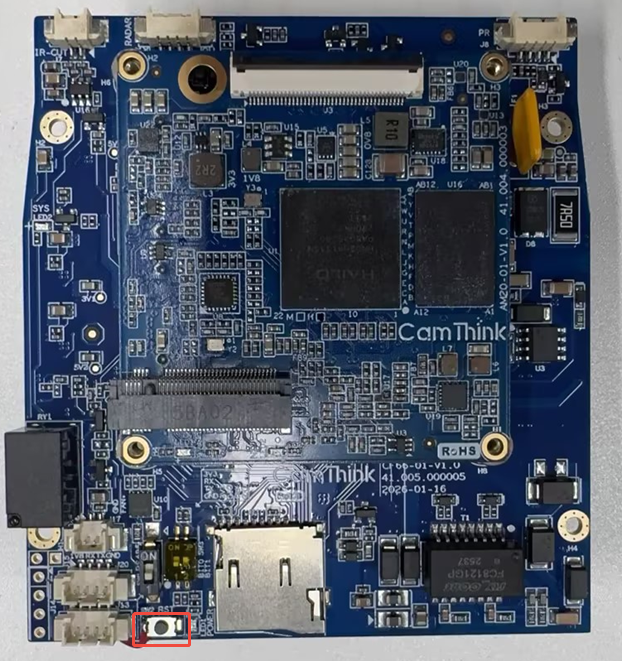
Steps:
- Switch to UART recovery mode (BOOT0 OFF, BOOT1 ON)
- Power on the device via PoE (RJ45 Ethernet port)
- Press the Reset button to enter flashing wait state
2.2 Load UART Recovery Firmware
uart_boot_fw_loader \
--serial-device-name /dev/ttyACM0 \
--firmware ./hailo15_uart_recovery_fw.bin

2.3 Flash SPI Flash Bootloader Components
This step writes all bootloader components to SPI Flash, including SCU firmware, U-Boot SPL, device tree, and more:
hailo15_spi_flash_program \
--scu-bootloader ./hailo15_scu_bl.bin \
--scu-bootloader-config ./scu_bl_cfg_a.bin \
--scu-firmware ./hailo15_scu_fw.bin \
--uboot-device-tree ./u-boot.dtb.signed \
--bootloader ./u-boot-spl.bin \
--bootloader-env ./u-boot-initial-env \
--customer-certificate ./customer_certificate.bin \
--uboot-tfa ./u-boot-tfa.itb \
--uart-load \
--serial-device-name /dev/ttyACM0
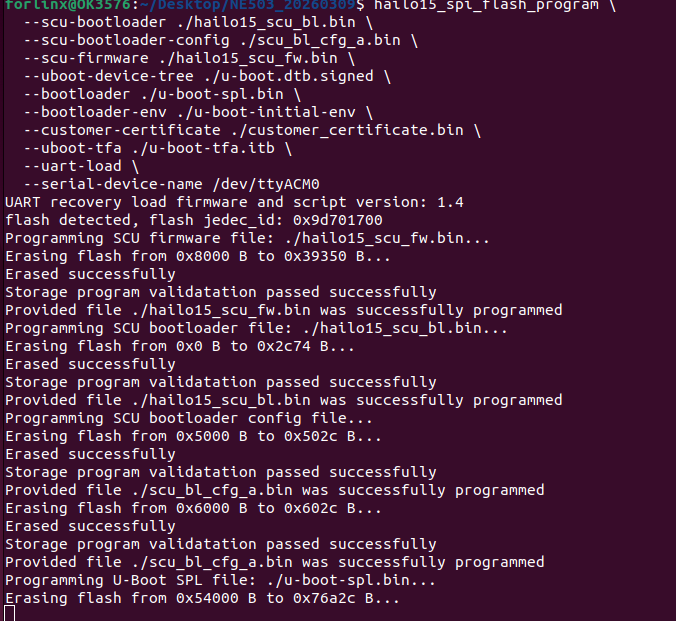
Expected output:
UART recovery load firmware and script version: 1.4
flash detected, flash jedec_id: 0x9d701700
Programming SCU firmware file: ./hailo15_scu_fw.bin...
Erasing flash from 0x8000 B to 0x39350 B...
Erased successfully
Storage program validation passed successfully
Provided file ./hailo15_scu_fw.bin was successfully programmed
Programming SCU bootloader file: ./hailo15_scu_bl.bin...
Erasing flash from 0x0 B to 0x2c74 B...
Erased successfully
Storage program validation passed successfully
Provided file ./hailo15_scu_bl.bin was successfully programmed
Programming SCU bootloader config file...
Erasing flash from 0x5000 B to 0x502c B...
Erased successfully
Storage program validation passed successfully
Provided file ./scu_bl_cfg_a.bin was successfully programmed
Programming U-Boot SPL file: ./u-boot-spl.bin...
Erasing flash from 0x54000 B to 0x76a2c B...
Erased successfully
Storage program validation passed successfully
Provided file ./u-boot-spl.bin was successfully programmed
Programming U-Boot env file: ./u-boot-initial-env...
Erasing flash from 0x50000 B to 0x54000 B...
Erased successfully
Storage program validation passed successfully
Provided file ./u-boot-initial-env was successfully programmed
Programming Customer certificate file: ./customer_certificate.bin...
Erasing flash from 0x4f000 B to 0x4fa14 B...
Erased successfully
Storage program validation passed successfully
Provided file ./customer_certificate.bin was successfully programmed
Programming u-boot device-tree file: ./u-boot.dtb.signed...
Erasing flash from 0x40000 B to 0x46d84 B...
Erased successfully
Storage program validation passed successfully
Provided file ./u-boot.dtb.signed was successfully programmed
Programming U-Boot & TF-A file: ./u-boot-tfa.itb...
Erasing flash from 0x80000 B to 0x103e80 B...
Erased successfully
Storage program validation passed successfully
Provided file ./u-boot-tfa.itb was successfully programmed
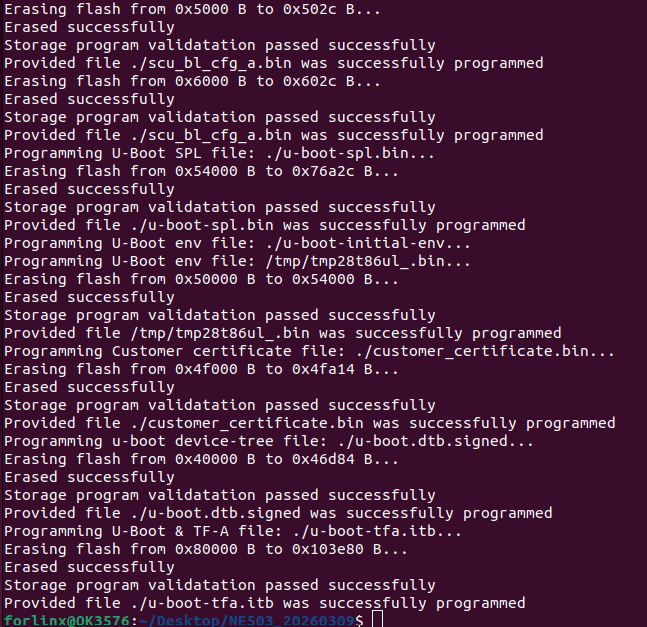
The above is typical output. Actual output may vary in casing or spelling across tool versions (e.g.
Storage program validatation), and the SCU bootloader config may be programmed twice (A/B redundant slots). Judge success by each component finally printingsuccessfully programmedand the process exiting with code 0; all 8 components should program successfully.
After flashing, restore the DIP switches to normal mode:
- BOOT0: OFF
- BOOT1: OFF

3. Flash System Image
Once the boot chain is ready, use the U-Boot menu to write the system image to eMMC.
3.1 Enter U-Boot Menu
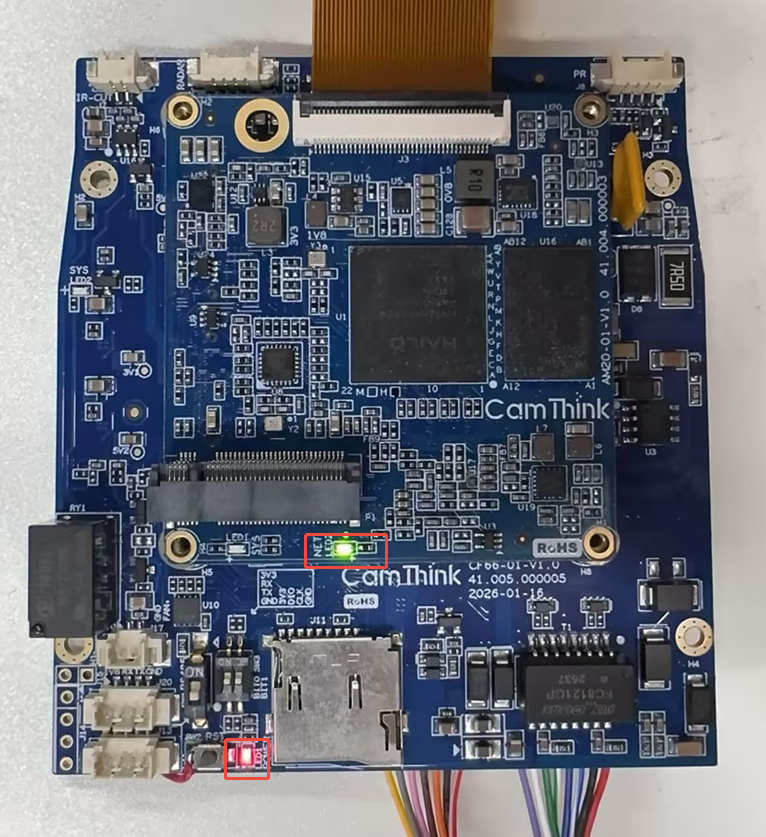
Confirm the DIP switches are in normal mode (BOOT0 OFF, BOOT1 OFF; see §1.4 DIP Switch Modes — if you just finished §2, the switches are already in normal mode). Power on the device via PoE through the RJ45 port. The on-board green LED will blink.
Once powered on, press ↑/↓ keys in the serial terminal to stop autoboot and enter the U-Boot menu:
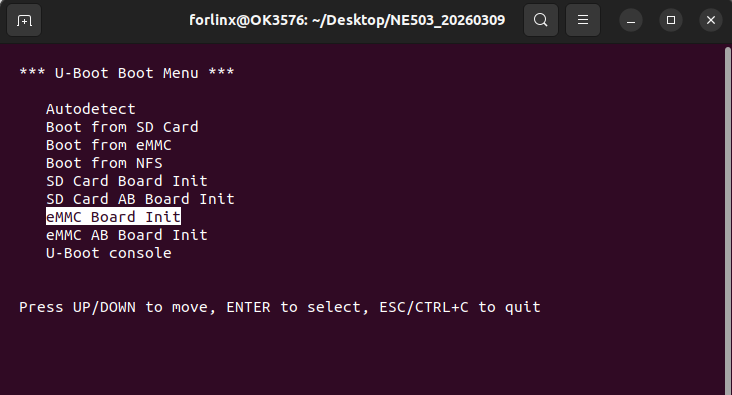
Available boot modes:
| Mode | Description |
|---|---|
| Autodetect | Auto-detect and boot (for devices with existing system) |
| Boot from eMMC | Boot from eMMC |
| eMMC Board Init | Recommended for first flashing: flash single system to eMMC |
| eMMC AB Board Init | Flash redundant dual-system to eMMC |
| U-Boot console | Enter command line mode |
3.2 Configure Network
U-Boot pulls images from the host pointed to by serverip — i.e. the host running your TFTP server from §1.3: the device IP defaults to 10.0.0.1 and serverip to 10.0.0.2. Before flashing, put the TFTP host and the device on the same subnet. Choose one of the following depending on the host's subnet.
Option 1 (recommended): put the host on the 10.0.0.x subnet. For a direct connection, assign the host NIC a static IP of 10.0.0.2 and leave the device at its default 10.0.0.1 — no U-Boot console needed:
# Ubuntu (replace the interface name, e.g. eth0 / enp0s25)
sudo ip addr add 10.0.0.2/24 dev eth0
# macOS: System Settings → Network → Ethernet → IPv4 Manual
# IP address 10.0.0.2 Subnet mask 255.255.255.0
Option 2: keep the host on another subnet and change the device IP to match. In the U-Boot menu, select U-Boot console and use setenv to modify the device environment. The defaults are shown below (use to confirm or reset back to the default network):
setenv ipaddr 10.0.0.1 # Device IP (default)
setenv serverip 10.0.0.2 # TFTP server (host) IP (default)
saveenv
reset
If the host is on another subnet (e.g. 192.168.93.x), replace the
ipaddr/serveripabove with addresses on the host's subnet: ensure the deviceipaddris on the same subnet as the host, andserveripis the host IP.
3.3 Execute Flashing
Return to the U-Boot menu and select eMMC Board Init. The device will automatically:
- Download
fitImage(kernel) via TFTP into memory - Download
swupdate-image-hailo15-ne503.ext4.gz(root filesystem) via TFTP into memory - Verify image signatures (RSA-3072 + SHA-256)
- Apply the
.swuupgrade package via SWUpdate to write the system to eMMC
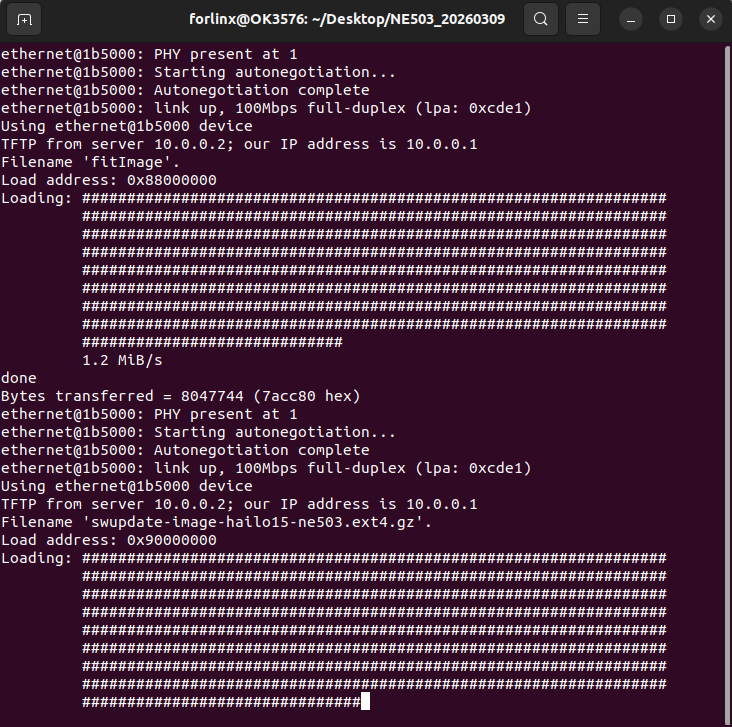
Relationship between the three system-image files:
fitImage(kernel) andswupdate-image-hailo15-ne503.ext4.gz(root filesystem) are packed intohailo-update-image-hailo15-ne503.swu(the SWUpdate bundle); after eMMC Board Init fetches it over TFTP, SWUpdate verifies the signature and writes the system to eMMC. All three must be placed in the TFTP directory from §1.3.
The device reboots into Linux after flashing completes.
4. Interface Board MCU Firmware
The interface board has a dedicated MCU (STM32G0B0RET6, Cortex-M0+) that manages all peripherals — lens, light, IR-CUT, PTZ, RS-485, alarm — and communicates with the core board over UART0. This MCU firmware is separate from the hailo-os system image: the meta-hailo-os package does not include MCU firmware and it must be flashed independently.
If you skip this: all peripherals fail —
camera-daemon's lens bridge keeps reportinglens_state_get failed: -2810,device-control's MCU query times out, andGET /api/v1/device/statusreturns 500 (the Web console shows "internal server error").
When required: mandatory for initial deployment; the same flow applies to MCU firmware upgrades. This step is independent of the SoC flashing in §2 Flash Boot Chain / §3 Flash System Image — order does not matter, but both must be done before §7 Verification.
4.1 Prerequisites
- Hardware: an ST-LINK debugger (V2/V3) connected to the interface board's SWD port (PA13/SWDIO, PA14/SWDCLK·BOOT0, NRST, GND, 3V3 VREF). Pinout in AIPC Board Connection.

- Power: the device must be powered (PoE) — ST-LINK does not power the board; the MCU is powered by the device supply. After SWD hookup, VREF should read ~3.2V.
- Host tool: STM32CubeProgrammer (see §1.2); uses the
STM32_Programmer_CLItool. - Firmware:
ne503_mcu.elf(see §1.1 Firmware Package).
BOOT0 does not need to be set — SWD works in normal boot mode (PA14 is the shared SWDCLK/BOOT0 pin). The SoC can only reset the MCU via
H_GPIO_18, not control BOOT0, so MCU firmware must be flashed via ST-LINK/SWD and cannot be done from the SoC alone.
4.2 Verify the SWD Connection
STM32_Programmer_CLI -c port=swd
Expected output (confirming the STM32G0B0 is reached):
Device name : STM32G0B0xx/B1xx/C1xx
Flash size : 512 KBytes
Device CPU : Cortex-M0+
Voltage : 3.22V
If it reports No STM32 device found: check the SWD wiring (SWDIO/SWDCLK/NRST/GND), confirm the device is powered, and confirm the host sees the ST-LINK (STM32_Programmer_CLI -l should list the probe).
4.3 Flash
STM32_Programmer_CLI -c port=swd -e all -w ./ne503_mcu.elf -v -rst
This performs: connect SWD → mass erase → write ne503_mcu.elf → verify → reset & run. Success is Mass erase successfully achieved, File download complete, Application is running, exit code 0.
4.4 Verify
If platform software is already deployed on the SoC, after the device boots:
curl -s -H "Authorization: Bearer <token>" http://<device-ip>:8080/api/v1/device/status
# returns 200; data.mcu_version / mcu_temp_c / light_sensor etc. have values
camera-daemonno longer reportslens_state_get failed: -2810.- The Web console Device Status panel shows MCU temperature, light sensor, IR-CUT, PTZ data.
The MCU firmware version is independent of the platform software version (e.g. platform v1.2.0 ↔ MCU firmware
0.1.0.0); each is upgraded separately. Disconnecting the ST-LINK after flashing does not affect operation.
5. System Login
After flashing, the device reboots automatically. Log in via serial console or SSH:
- Username:
root - Password:
root
For system checks after logging in, see §7 Verification.
6. System Upgrade
This section covers system image upgrades, performed in-place via the SWUpdate mechanism using .swu packages.
6.1 U-Boot TFTP Upgrade
A full system-image upgrade reuses the same flow from §3.3 (U-Boot menu → eMMC Board Init → TFTP → SWUpdate writes eMMC); the only difference is replacing the .swu package in the TFTP directory with the new version. No need to redo §2 boot chain.
Brief steps:
- Overwrite the old
hailo-update-image-hailo15-ne503.swuwith the new version in the TFTP directory from §1.3 - Power on in normal mode, enter the U-Boot menu (press
↑/↓to stop autoboot), and select eMMC Board Init - The device automatically downloads the new
.swupackage over TFTP; SWUpdate writes it to eMMC
# Upgrade log example
hailo-update-image-h 9% |*** | 72.1M 0:03:49 ETA
The
.swupackage is large (~100MB+). Over 100Mbps Ethernet the full upgrade takes about 5-10 minutes. Do not power off or disconnect during the upgrade.
6.2 Runtime Firmware Update
Steps for online system-image upgrades via the SWUpdate CLI from within a running Linux system are pending and will be provided by the engineering team. For runtime deployment of platform software (ai-runtime, Web console, etc.), see Software Deployment.
7. Verification
After flashing or upgrading, verify the following:
# 1. Kernel version
uname -r
# 5.15.x (yocto-standard)
# 2. Filesystem
df -h /
# /dev/mmcblk1p2 3.6G 3.xG xxM xx% /
# 3. Hailo kernel modules (NPU / ISP / video pipeline)
lsmod | grep hailo
# hailo_integrated_nnc / hailo15_isp / hailo15_video_cap ...
# 4. Network interface
ip addr show eth0
# 5. Platform services (if platform software is deployed)
systemctl status ai-runtime camera-daemon app-manager event-bus device-control platform-api
Device nodes: the system image lives on eMMC (
/dev/mmcblk1) and the boot chain on SPI Flash (/dev/mtdblock0). The Hailo NPU is provided by thehailo_integrated_nnckernel driver and is not necessarily exposed as a/dev/hailo*device node — uselsmod | grep hailoto verify the driver is loaded.
8. Troubleshooting
Common issues are listed in operational order (§2 boot chain → §3 system image → §6 upgrade). Each follows the pattern: Symptom → Cause → Resolution.
8.1 Boot-Chain Flashing Issues
Symptom: uart_boot_fw_loader or hailo15_spi_flash_program is unresponsive / reports a serial error
- Cause: The DIP switches are not in UART recovery mode, the serial device node is wrong, or the serial adapter is not 1.8V-level.
- Resolution:
- Confirm the DIP switches are BOOT0 OFF, BOOT1 ON (UART recovery mode, see §1.4 DIP Switch Modes), and that Reset has been pressed;
- Confirm
--serial-device-namepoints to the correct node (on Ubuntu, typically/dev/ttyACM0); - Confirm the serial adapter is 1.8V-compatible (see §1.4 Hardware Connection).
Symptom: hailo15_spi_flash_program reports could not connect to the recovery agent; or crashes mid-way (e.g. mkenvimage not found, or write didn't succeeded), leaving the boot chain half-written
- Cause: The device is not in UART recovery mode; or the host is missing
mkenvimage(see §1.2); or a previous tool crash left the device's UART recovery agent in a degraded state, so on retry the flash writes receive no ACK — even erasing-without-writing, which makes the boot chain less complete. - Resolution:
- Confirm the DIP switches are in UART recovery mode (BOOT0 OFF, BOOT1 ON), and that
mkenvimageis installed on the host (Ubuntu:u-boot-tools; macOS:brew install u-boot-tools); - Fully power-cycle the device (unplug PoE → wait 3 seconds → re-apply), keep the DIP switches unchanged, then press Reset once more — a single Reset is usually insufficient to reset a degraded recovery agent;
- Run
uart_boot_fw_loader+hailo15_spi_flash_programback-to-back in a single recovery session, without leaving a long gap between them.
- Confirm the DIP switches are in UART recovery mode (BOOT0 OFF, BOOT1 ON), and that
- A corrupted boot chain is always recoverable: UART recovery runs from the SoC's masked ROM and is independent of SPI Flash contents.
8.2 TFTP & Network Issues
Symptom: U-Boot reports TFTP error: 'Access violation' (2) or download times out
-
Cause: The TFTP server is not running, or firmware files are missing from the TFTP directory / have insufficient permissions.
-
Resolution:
# Ubuntu: check service status and directory
sudo systemctl status tftpd-hpa
ls -la /var/lib/tftpboot/
# macOS: check port 69 listener
sudo lsof -i :69Ensure
fitImage,swupdate-image-hailo15-ne503.ext4.gz, andhailo-update-image-hailo15-ne503.swuare present in the TFTP directory and readable.
Symptom: macOS TFTP reports Operation not permitted
- Cause: macOS privacy protection prevents
tftpdfrom reading user directories. - Resolution (either):
- System Settings → Privacy & Security → Full Disk Access → Add
/usr/libexec/tftpd - Change the TFTP directory to
/private/tftpboot
- System Settings → Privacy & Security → Full Disk Access → Add
Symptom: U-Boot menu is reachable, but TFTP download is unresponsive
- Cause: The host and device are on different subnets, or the host IP is not the address pointed to by the device's
serverip. - Resolution: Check §3.2 Configure Network — set the host to
10.0.0.2and leave the device at its default10.0.0.1; or test connectivity manually from the U-Boot console withtftp 0x80800000 fitImage.
8.3 eMMC Flashing Issues
Symptom: Selecting eMMC Board Init fails or hangs
- Cause: No network connectivity, missing TFTP files, or image signature verification failure (corrupted files).
- Resolution:
- Check the Ethernet cable and IP configuration (§3.2);
- Confirm the files in the TFTP directory are complete and not truncated;
- Re-download the firmware package from the open-source repository to overwrite any corrupted files.
8.4 Upgrade Interruption Recovery
Symptom: Power loss during upgrade leaves the device unbootable
- Cause: The interruption left the eMMC system image or boot chain incomplete.
- Resolution:
- If the boot chain is corrupted (no U-Boot menu), re-execute §2 Flash Boot Chain;
- Re-execute §3 Flash System Image to write a complete image.
8.5 U-Boot Fails to Boot
Symptom: No U-Boot menu output on the serial terminal after power-on
- Cause: The DIP switches are not in normal mode, or the boot chain is not flashed / is corrupted.
- Resolution:
- Confirm the DIP switches are in normal mode (BOOT0 OFF, BOOT1 OFF);
- If there is still no output, re-execute §2 Flash Boot Chain.
8.6 Interface Board MCU Issues
Symptom: the Web console shows "internal server error"; GET /api/v1/device/status returns 500 and takes ~5s; camera-daemon logs lens_state_get failed: -2810 repeatedly
- Cause: the interface board MCU firmware is not flashed (or is corrupted), so the MCU does not respond on UART0 and
device-control's query times out. - Resolution: flash
ne503_mcu.elfvia ST-LINK/SWD per §4. After flashing,device/statusshould return 200 withmcu_versionand other fields.
Symptom: STM32_Programmer_CLI -c port=swd reports No STM32 device found
- Cause: wrong SWD wiring, device not powered, or the host does not see the ST-LINK.
- Resolution: verify the SWD wiring (SWDIO/SWDCLK/NRST/GND/VREF); confirm the device is powered via PoE (VREF≈3.2V);
STM32_Programmer_CLI -lshould list the ST-LINK probe.
9. Related Documentation
- System Architecture — Four-layer architecture and core services
- Software Deployment — Platform software deployment and iterative development